Torna alle news

L’esecuzione di misure su terreni, frane o smottamenti, edifici e beni architettonici è legata in maniera intrinseca all’errore. L’utilizzo del rilievo metrico consente un controllo degli errori nel loro insieme, grazie alla misura di punti di controllo che si trovano distribuiti in maniera uniforme sull’oggetto del rilievo.
In passato gli esperti del settore, per eseguire misurazioni su architetture, monumenti od oggetti di interesse operavano rilevando la distanza in maniera diretta. Tra Settecento e Ottocento, con il perfezionamento del cannocchiale la misura delle distanze si deduce dalla misura degli angoli. Sul finire del Novecento appaiono nuovi metodi di rilievo metrico architettonico, basati sull’integrazione della fotogrammetria. Attorno agli anni Duemila hanno fatto la loro comparsa le tecniche LIDAR e pochi anni dopo i sistemi SfM (Structure from Motion). Passaggi fondamentali per l’ottenimento di gradi di precisione e livelli di dettaglio fino a pochi anni fa impensabili.

Attraverso il metodo topografico è possibile rilevare a partire da reti o poligonali di punti (che saranno poi i vertici), aventi coordinate note. Da questa base di partenza, con la celerimensura si entra nel rilievo di dettaglio. La distribuzione dei vertici di appoggio deve distendersi in maniera omogenea rispetto all’area complessiva di rilievo, abbracciandola con forme poligonali chiuse. La distribuzione dei vertici nello spazio è determinata non solo dall’oggetto del rilievo ma anche dalle caratteristiche morfologiche del sito e dagli ostacoli fisici. Una volta definiti i punti di appoggio topografico, si effettua un infittimento di punti su ogni porzione dell’oggetto.

Indipendentemente dal tipo di rilievo da svolgere è utile definire i vertici della poligonale nell’area immediatamente circostante l’oggetto. Sempre più spesso si va ad effettuare la cattura delle loro coordinate con l’ausilio dei sistemi GNSS (Global Navigation Satellite System). Dai vertici si definiscono poi i punti di controllo sull’oggetto con l’ausilio della celerimensura, che impiega la tecnologia della stazione totale. Questi punti di controllo sono utili anche alle future fasi di processing in fotogrammetria e LIDAR.
Prima dell’era digitale, la cartografia era prodotta a partire dall’aerofotogrammetria, per mezzo di complesse camere fotogrammetriche montate su carlinghe di aerei che sorvolano il territorio. Le ben note CTR sono state realizzate adottando questo metodo.
Recentemente invece il telerilevamento da satellite ha integrato la fotogrammetria aerea per l’aggiornamento cartografico, aumentando il range della quota di acquisizione.
Le riprese da basse quote invece, per mappare aree con un grado elevato di dettaglio, erano svolte fino a non molto tempo fa tramite mongolfiere e aquiloni. Esse sono oggi rilevate tramite dispositivi aerei UAV (Unmanned Aerial Vehicle), ovvero droni pilotati sia in remoto sia in manuale, facilmente reperibili sul mercato.

Questo tipo di strumentazione è sempre più utilizzata, oltretutto per i più svariati impieghi: dal rilievo territoriale nell’ambito agroforestale all’analisi in campo architettonico-urbano, dai sopralluoghi in luoghi di precarietà o completamente inaccessibili, al monitoraggio post disastri naturali.
L’impiego dei droni per fini conoscitivi nel campo della Geomatica è sempre più in crescita. Questo per via della diffusione dei sistemi di automazione della fotogrammetria (SfM) e della possibilità da parte degli esperti di fotogrammetria di pilotare essi stessi questi dispositivi. Ciò ovviamente dopo aver acquisito le opportune cognizioni di volo, ma senza dover possedere le medesime capacità di un pilota di velivolo tradizionale.
L’utilizzo dei droni nel processo di rilievo ha portato a un’importante semplificazione nelle procedure per quanto riguarda logistica e i tempi di lavoro sul campo.
La tecnologia laser scanning che permette l’acquisizione di un gran numero di dati relativi all’oggetto di rilievo, in maniera rapida ed estremamente precisa, viene anche definita LIDAR (Light Detection and Ranging).
Il suo impiego spazia da scenari di scala territoriale e urbana, manufatti di tipo architettonico e persino oggetti tanto piccoli da dover essere poi ingranditi nella post produzione.

Gli strumenti LIDAR condividono le stesse basi tecnologiche dei distanziometri, ovvero la possibilità di misurare distanze tramite emissione di impulsi elettromagnetici. Avanzamenti tecnologici che hanno segnato un cambiamento storico del rilievo e che negli ultimi due decenni hanno dato vita ad applicazioni in diversi ambiti disciplinari.

Questo passaggio storico ha portato a un radicale ripensamento del concetto di rilievo e alle procedure operative. Vale la pena ricordare che in passato, prima di procedere alla misurazione vera e propria, si rendeva necessaria -viste le tempistiche rilevanti di esecuzione- una scrematura dei punti da battere.
Oggigiorno invece, grazie alle caratteristiche di questa tecnologia, si parte immediatamente con la fase di misurazione. La tecnologia permette infatti di catturare enormi quantità di dati in tempi anche ristretti. Sarà quindi in una seconda fase che si andrà a ripulire la massa dei dati dalle informazioni fuorvianti.
Con l’ausilio della tecnica LIDAR è possibile ottenere nuvole di punti 3D della superficie dell’oggetto di rilievo, in cui ogni punto contiene specifiche coordinate cartesiane e informazioni cromatiche di riflettanza in 2D.
Vi sono due tipologie di laser scanner, distanziometrici e triangolatori. I primi utilizzano gli stessi principi delle stazioni totali, ovvero la misurazione delle distanze mediante lo sfasamento dell’onda laser. L’informazione si ottiene proiettando un raggio di luce laser in monofrequenza e unidirezionalità verso un oggetto. Questo raggio viene in parte riflesso dal corpo colpito. In base al tempo impiegato dal raggio luminoso e in base allo sfasamento è possibile determinare la distanza tra la stazione e l’oggetto. L’output di un rilievo con questo strumento è costituito da coordinate polari che poi dovranno essere convertite in coordinate cartesiane.
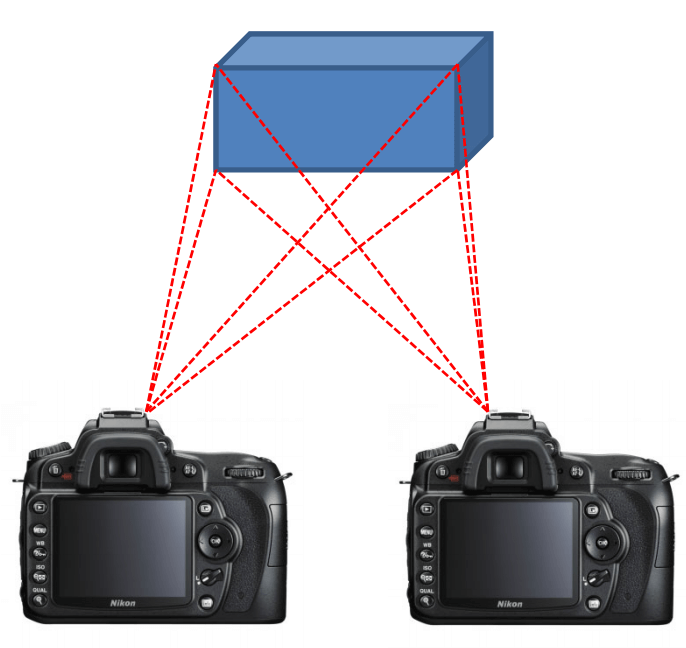
Questi strumenti si basano sui principi del calcolo del tempo di volo, ovvero il tempo che il raggio impiega a essere emesso e riflesso. Si ottenengono così le distanze strumento-oggetto e sul principio della comparazione di fase, ovvero confrontando la modularità d’onda del raggio emesso con quello riflesso. Inoltre all’interno dello strumento vi è una fotocamera, che permette di associare un valore RGB a ogni punto rilevato. Gli scanner triangolatori invece, utilizzano gli stessi principi della fotogrammetria definendo la posizione di un punto nello spazio partendo dall’intersezione di due rette di direzione nota.

Queste rette sono definite dal raggio emesso e dal raggio riflesso dall’oggetto a generare due angoli con la base del sensore, che consiste nella distanza tra l’emettitore e la camera. Vi è un’ulteriore distinzione importante tra i laser scanner triangolatori, ovvero in base al numero di camere montate sullo strumento.
Gli scanner a camera singola montano un emettitore laser che direziona il raggio su uno specchio rotante ad angolo variabile. Questi è sua volta montato su una base che a sua volta lo proietta verso l’oggetto da rilevare; sull’altra estremità della base è posizionata una camera che riprende l’oggetto. Gli scanner a camera doppia, utilizzati di frequente nel rilievo di dettaglio submillimetrico di oggetti piccoli, non montano lo specchio rotante degli scanner a camera singola, ma al loro posto è montata una seconda camera con interposto tra le due l’emettitore laser. Questa tipologia di scanner proietta il laser direttamente sull’oggetto e il raggio riflettendosi viene catturato dai sensori nelle due camere.
Nonostante i grandi automatismi degli strumenti LIDAR e la loro facilità nell’acquisire enormi quantità di dati, è comunque necessario tener conto di diversi fattori. Fattori che se non considerati possono portare a dover ripetere le operazioni sul campo, aumentando tempi e costi.
Bisogna considerare infatti le caratteristiche del sito di rilievo e le condizioni meteorologiche e climatiche. Ma allo stesso tempo non dobbiamo scordarci delle caratteristiche di luminosità e del materiale delle superfici nonché la maneggevolezza delle operazioni.